Livox 3D-LiDARを本格的な産業用途へ利用可能に | Livox Technology Company
Livoxは、LiDARテクノロジーの可能性を最大限に引き出すことにより、自律的な世界を加速することに取り組んでいます。
高度なセンサーユニットのラインで、私たちは企業や開発者にこのテクノロジーをプロジェクトやプラットフォームに組み込むための信頼できるルートを提供します。当社のLiDARセンサーは、高性能で手頃な価格ですぐに使用でき、業界を変えて未来を展望する力を備えています。
- 自動搬送
- ロボット
- スマートシティ
- セキュリティ
- ドローン
- 自動走行
- 距離検知
- 物体検知
- 衝突防止
- 3Dマッピング
技術者コラム
- 3D-LiDAR(Livox:HAP)とカメラのセンサーフュージョン 安価で高機能な Livox 社製 HAP と USB カメラを使って、センサーフュージョンを実現しました。
- 3D-LiDAR(Livox:MID-360)を使った3D-MAP作成 10万円以下の3D-LiDAR: Livox 社製 MID-360 を使って、3D-MAP作成(LIO-Livox)を実装しました。
- 3D-LiDAR(Livox:MID-360)を使った3D-MAP作成 - FAST-LIOの実装 Livox製 MID-360 を使って、3D-MAP作成(FAST-LIO)をハンディーマップキットに実装しました。
- 3D-LiDAR(Livox:MID-360)を使った自己位置推定と移動軌跡の取得(FAST-LIO-LOCALIZATION) Livox 製 MID-360 を搭載したハンディーマップキットを使って、自己位置推定&移動軌跡を実装しました。
Livox 3D-LiDAR 製品情報
-
- モデル
- Tele-15
- Mid-70
- AVIA
- NEW ⁄ 車載対応品
HAP - NEW
Mid-360
-
-
- レーザー波長
- 905 nm
- 905 nm
- 905 nm
- 905 nm
- 905 nm
-
- 安全等級
- クラス 1
(IEC60825-1:2014) - クラス 1
(IEC60825-1:2014) - クラス 1
(IEC60825-1:2014) - クラス 1
(IEC60825-1:2014) - クラス 1
(IEC60825-1:2014)
-
- 範囲
- 180 m @ 反射率10%
- 90 m @ 反射率10%
- 190 m @ 反射率10%
- 150 m @ 反射率10%
- 40 m @ 反射率10%
-
- (@100 キロ ルクス)
- 250 m @ 反射率20%
- 130 m @ 反射率20%
- 230 m @ 反射率20%
- -
- -
-
- 500 m @ 反射率80%
- 260 m @ 反射率80%
- 320 m @ 反射率80%
- 210 m @ 反射率80%
- 70 m @ 反射率80%
-
- FOV
- 15° 円形
- 70.4°円形
- 70.4°(水平) ×
77.2°/4.5°(垂直) - 120°(水平) × 25°(垂直)
- 360°(水平) ×
59°(-7~52°)(垂直)
-
- 走査方法
- 非反復走査
- 非反復走査
- 非反復走査 ⁄
反復走査 - 非反復走査
- 非反復走査 ⁄
反復走査
-
- データサイズ
- 240,000 点 ⁄ 秒
- 100,000 点 ⁄ 秒
- 240,000 点 ⁄ 秒
- 452,000 点 ⁄ 秒
- 200,000 点 ⁄ 秒
-
- 動作環境温度
- -40℃ ~ 85℃
- -20℃ ~ 65℃
- -20℃ ~ 65℃
- -40℃ ~ 85℃
- -20℃ ~ 55℃
-
- IP等級
- IP67(注3)
- IP67(注3)
- IP67(注3)
- IP67
- IP67
-
- インターフェース
- イーサネット
- イーサネット
- イーサネット
- 車載イーサネット ⁄
イーサネット - イーサネット
-
- サイズ
- 122 × 105 × 94mm
- 97 × 64 × 62.7mm
- 91 × 61.2 × 64.8mm
- 99.6 × 103 × 65mm
- 65 × 65 × 60mm
-
- 重量
- 約 1400g
- 約 580g
- 約 498g
- 約 1040g
- 約 265g
-
- WEBプライス
- ¥148,000
- ¥92,400
- ¥167,200
- ¥189,200
- ¥91,740





独自の走査パターンが鍵
一般的なMulti-line Spining LiDARと異なり、プリズムを回転させることで、独特の模様を描く独自のスキャン方式(非反復走査:花びら状/∞字状)行うことにより、積分時間をあげることで、FOV(視界)内の走査率を上げることが可能で、Tele-15では約0.1秒でFOV内の99.8%の範囲を走査出来ます。(128 lines以上の検出率を実現)
-
2パターンの非反復走査
-
-
カバー率

新製品
-
MID-360
手のひらサイズの超小型で安価、360°センシングが可能な3D-LiDAR
MID-360は、低速ロボティクス向けの最新世代のLivox LiDARです。Livox Midシリーズの高い費用対効果を継承し、360度の3D認識能力を実現します。 コンパクトかつ軽量で、簡単に取り付けることができます。 Mid-360は、小型モビリティのナビゲーションと障害物回避の要件に基づいて最適化されています。 そのため、LiDARをアルゴリズムと共に使用し、SLAMや障害物回避など幅広い環境で適用できます。
| 測定距離 | FOV | 距離精度 | 近距離 | FPS |
| 40m@反射率10% | 360°(水平)x59°(垂直) | 2cm | <10cm | 10Hz |
-
FOV:360°x59°(-7~52°)

-
走査動画
-
非反復走査

-
MID-360採用例
場所:深センのショッピングモール
特徴: 複雑
材質:ガラス、金属、高反射素材
移動体:人、ベビーカーなど
室内-室外:太陽光干渉
環境サイズ:≈150m*60m(9000㎡)
-
HAP
車載品質に対応、市場実績もある高密度な3D-LiDAR
HAPはLivoxの自社試験センターで70項目を超える車載グレード信頼性試験を受け合格しています。
中国合格評定国家許可委員会(CNAS)標準に基づき建設されたこの工場は最新鋭の試験機器を備え、 業界をリードする専門家チームにより運営されています。この構成によりLivoxは驚くほど効率的な試験機能を持ち、 HAPが大手自動車メーカーの標準とISO 16750などの産業規格に対応することを可能にします。
| 測定距離 | FOV | 距離精度 | 角度分解能 | サイズ | 設計寿命 |
| >140m @ 10%反射率 | 120°(H)x25°(V) | 2cm | 0.22°x0.18° | 99.6mmx103mmx65mm (W*D*H) |
15年/12,000時間/ 30万キロ |
HAP採用例
各種用途に応じた3D-LiDARをラインナップ
各種用途の要求(測定距離や視野角等)に対応したラインナップを取り揃えています。
-
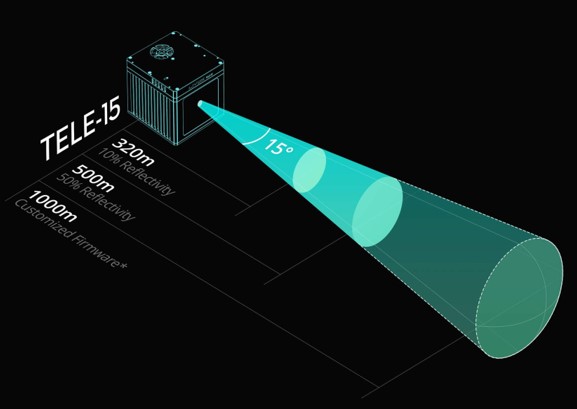
Tele-15
- 500m@反射率80%
- 2cm範囲精度
- 0.1°角度精度
- FOV:15°円形
-
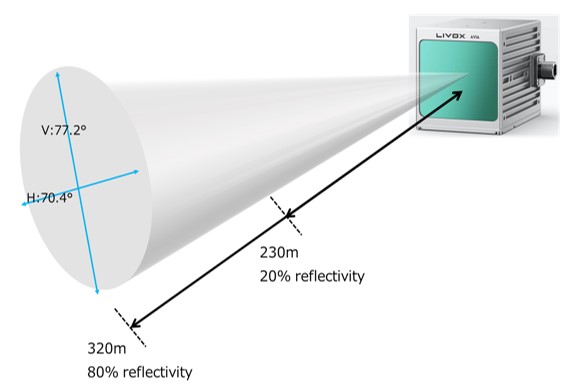
Avia
- 320m@反射率80%
- 2cm範囲精度
- 0.05°角度精度
- FOV:70.4°(水平)x77.2°(垂直)
70.4°(水平)x4.5 °(垂直)
-
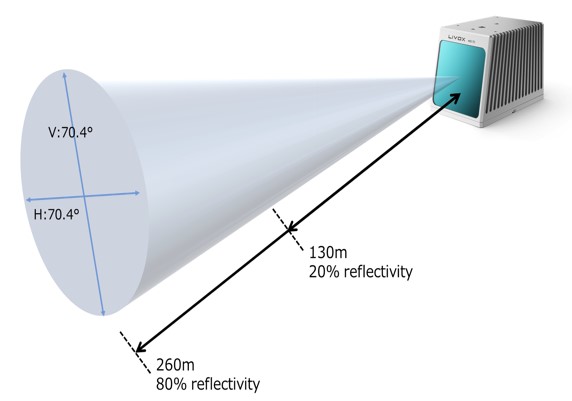
MID-70
- 260m@反射率80%
- 2cm範囲精度
- 0.1°角度精度
- FOV:70.4°円形
サクセスストーリー:自動運転芝刈り機への採用
米国 RC Mowers様 の自動運転芝刈り機にMID-70が採用されました!


採用のポイント
- MID-70を前後左右に配置し、障害物検知を低価格で実現。
- 2D-LiDARは、水平方向のみに広い FOV を有しているが、MID-70は垂直方向にも広い FOV(70.4°×70.4°)を有している。
用途
Livox社の安価で高性能な3D-LiDARにより、自動運転やロボットだけでなく、あらゆる分野に3D-LiDARが活用することが可能となりました。
高速自動運転
-
乗用車&RobotTaxi

-
トラック

-
自動運転向けマップ

-
V2X

ロボット
-
自動掃除機

-
自動配送ロボット

-
物流・工場ロボット

-
自動草刈機

マッピング
-
ドローン3Dマッピング

-
Staticマッピング

-
Mobileマッピング

-
ハンドマッピング

Others
-
セキュリティ

-
スマート農業

-
工場生産サポート

-
鉄道

豊富なサンプルプログラム
C、C++、Pythonを使ったサンプルプログラムや、ROSを使った3Dマップデータ作成、
自己位置推定、物体検知等のサンプルプログラムがGithub上に公開されています。
これらのサンプルソフトウエアはすべて無償で、ソースコードも開示されており、素早くLiDARの評価を開始することが可能です。
| サンプルSW | 機能 | URL |
| Livox-SDK TELE-15 ⁄ AVIA ⁄ MID-70用 |
SDK(C ⁄ C++を使ったサンプル) | |
| Livox-SDK2 HAP ⁄ MID-360用 |
SDK(C ⁄ C++を使ったサンプル) | |
| livox_ros_driver TELE-15 ⁄ AVIA ⁄ MID-70用 |
ROSドライバ | Github |
| livox_ros2_driver TELE-15 ⁄ AVIA ⁄ MID-70用 |
ROS2ドライバ | |
| livox_ros_driver2 HAP ⁄ MID-360用 |
ROS ⁄ ROS2ドライバ | |
| LIO-Livox | 3D-MAP作成 | |
| livox_mapping | 3D-MAP作成 | Github |
| livox_detection | 物体検知 | Github |
| livox_laser_simulation | Gazebo用シミュレーションデータ | Github |
| livox_camera_lidar_calibration | LiDARとカメラのキャリブレーション | Github |
| e-nextyコラム | LiDARとカメラのセンサーフュージョン | |
| 3D-MAP作成&加工 |
オプション
-
Livox 3線式航空コネクター
一方の端はM12航空コネクター(メス)、もう一方が電源、イーサネット、機能ケーブルコネクターで構成されています。
- 同梱物
- 航空コネクター電源ネットワークポートケーブル×1
- 仕様
- 長さ: 1.5 m

-
Livox HAP (T1) ワイヤーパック
HAP(T1:車載イーサネット)用
電源ケーブルとネットワークケーブルが付属しています。- 同梱物
- 電源ケーブル ×1
- 車載イーサネットケーブル×1
- 仕様
- 車載イーサネットケーブル 長さ: 1.8 m

-
Livox M12 航空プラグ延長ケーブル (1m)/(5m)
Livox LiDARユニット本体と、本体に同梱されるケーブルの間に挿入することにより、LiDARの設置場所の自由度を高めます。
1m 延長ケーブル or 5m 延長ケーブル- 同梱物
- M12航空プラグ延長ケーブル 1m or 5m x1

-
Livox AC電源アダプター
100~240V ACを12V DCに変換します。
Livox LiDARユニットに電力を供給する場合は、この電源アダプターを使用することをおすすめします。- 同梱物
- Huntkeyアダプター × 1
- AcBel 電源アダプター ACケーブル × 1
- 電源アダプターコネクター × 1
- 仕様
- 入力電圧:100VAC~240VAC、50Hz~60Hz
- 出力電圧:12 V
- 定格電力:84 W
- 動作環境温度:0° ~ 40° C
*)Livox 3線式航空コネクターと接続する場合は、コネクタの変更が必要になります。

